LAB Pro

Tässä artikkelissa kuvataan Near Infrared -teknologiaan (NIR) perustuvan käsiskannerin suunnittelua ja pilotointia. Tavoitteena on rakentaa järjestelmä, jonka avulla voidaan mitata materiaalinäytteiden spektrejä lähi-infrapuna-alueella ja hyödyntää niitä materiaalintunnistuksessa. Artikkeli keskittyy käsiskannerilaitteen suunnitteluratkaisuihin, järjestelmäarkkitehtuuriin ja keskeisten toimintojen pilotointiin.
Kirjoittajat: Matti Welin, Kirsti Cura ja Jesse Piiparinen
Johdanto
Tekstiilijätteen erilliskeräys tuli Euroopan Unionin alueella pakolliseksi vuoden 2025 alusta (European Commission 2023). Jo nyt voidaan varmuudella todeta, että tekstiilijätteen määrä kasvaa, mutta laatu huononee (Phys.org 2025). Yksi haastavimmista pullonkauloista on kerätyn tekstiilijätteen lajittelu, mikä on perinteisesti ollut tuotteiden uudelleenkäyttöön lajittelua. Tekstiilin materiaalihyödyntämisen kannalta on välttämätöntä tunnistaa kerättyjen tekstiilien materiaalikoostumus (Cura et al. 2021). Yhä edelleen ylivoimaisesti yleisin tapa lajitella on käsinlajittelu (Köhler et al. 2021). Euroopassa tutkitaan ja pilotoidaan suuren mittakaavan optiseen tunnistukseen perustuvia lajittelulaitoksia. Ne kuitenkin vaativat suuria ja tasalaatuisia määriä tunnistettua materiaalia, jotta toiminta on kannattavaa. Pienemmät kierrätyskeskukset ja lajittelupisteet hyötyisivät helppokäyttöisestä ja nopeasta tekstiilimateriaalin tunnistusmenetelmästä.
Käsikäyttöistä viivakoodilukijaa muistuttava käsikäyttöinen ja/tai kannettava skanneri on monelle nykyiselle tekstiilijätteen käsinlajittelijatoimijalle hyödyllinen lisä kerätyn tekstiilin käsittelyyn (Matoha 2022). FINIX-projektiin (2025) liittyneen kehitystyön tavoitteena on ollut suunnitella sellainen kannettava akkukäyttöinen skanneri, jonka avulla voidaan mitata kohdemateriaalista takaisin heijastuvaa lähi-infrapuna-alueen säteilyä ja saada mitattu spektridata talteen myöhempää käyttöä varten. Lisäksi suunnitteluratkaisu pilotoitiin toimivaksi prototyypin avulla. Mittaustulosten perusteella järjestelmä kykenee joko itsenäisesti tai pilvipalveluun liitettynä tunnistamaan materiaaleja spektroskooppisen datan pohjalta. Laitteen suunnittelussa painottuivat kokonaisarkkitehtuuri, liitettävyys, mittaustarkkuus ja käyttömukavuus. Kokonaisjärjestelmä muodostuu useasta toisiinsa liitetystä osa-alueesta.
NIR-sensorin valinta ja mittausperiaate
Järjestelmän mittausydin perustuu Spectral Enginesin Nirone-sarjan S2.0 -sensoriin, joka kattaa aallonpituusalueen 1550–1950 nm. Laite hyödyntää kahta volframilamppua laajakaistaisina säteilylähteinä ja mittaa kohdemateriaalin takaisin heijastamaa säteilyä anturin pinnalle asennetun optiikan avulla. Pienen kokonsa (25x25x17,5 mm), keveytensä (38 g) ja vähäisen tehontarpeen (<300 mW) ansiosta sensori soveltuu hyvin kannettaviin laitteisiin. (Spectral Engines 2024) Kuvassa 1 on esitetty Nirone-sensori.

Kuva 1. Nirone-sensori (Spectral Engines 2017)
Ennen mittauksia Nirone-sensori tulee kalibroida taustasäteilyn ja valkoreferenssin määrittämiseksi. Kalibrointimittausten avulla anturilta saatava mittaustulos voidaan normalisoida välille 0–1. Näin varmistetaan mittaustulosten vertailukelpoisuus eri käyttökerroilla.
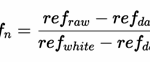
Kuva 2. Kaava, jonka mukaan Nirone-sensori kalibroidaan mittausvalmiuteen. refraw = alkuperäinen mitattu arvo, refdark = edustaa mittauksen nollatasoa/taustakohinaa, refwhite = valkoinen referenssiarvo, joka edustaa mittauksen maksimia/täydellistä heijastusta.
Nirone-sensori liitetään järjestelmiin USB 2.0 Micro B -liitynnän avulla. Sensorin ohjaus perustuu asynkroniseen sarjaviestintään. Sen avulla laitteelle lähetetään komentoja ja vastaanotetaan dataa. Varsinainen protokolla sisältää sekä ASCII-pohjaista tiedonsiirtoa että binäärimuotoista mittausdataa.
Järjestelmäarkkitehtuuri
Järjestelmäarkkitehtuurin tehtävänä on suunnitella laitteen toiminta kokonaisuutena sekä varmistaa eri osien liitynnät ja yhteensopivuus. Koska Nirone sensori toimii komentojen pohjalta, laitteessa tarvitaan sulautettu tietokone, johon sensori liitetään. Tietokoneessa tulee siis olla vähintään yksi mielellään USB-pohjainen sarjaportti, sekä langaton lähiverkkoliityntä (WLAN), jotta vaadittu pilvipalveluyhteys voidaan toteuttaa.
Itse mittaus sekä kalibrointitoiminnot käynnistyvät käyttäjän toimesta ja tätä varten tarvitaan laitteessa kolme kytkintä, joiden avulla ne voidaan toteuttaa. Lisäksi on hyvä esittää tilatietoja esim. ledien avulla. Tarvitaan siis myös muutama digitaalilähtö, joilla voidaan ilmaista laitteen tila.
Informaatio materiaalin tunnistamisesta käyttäjäystävällisesti edellyttää graafista käyttöliittymää. Koska käsiskanneriin ei tila- eikä tehonkulutussyistä voida liittää graafista näyttöä, olisi sulautetussa tietokoneessa hyvä olla esim. Bluetooth-liityntä, joka on riittävän nopea, kuluttaa vähän energiaa ja jonka kautta graafinen käyttöliittymä voidaan toteuttaa. Järjestelmäarkkitehtuuri on esitetty kuvassa 3.
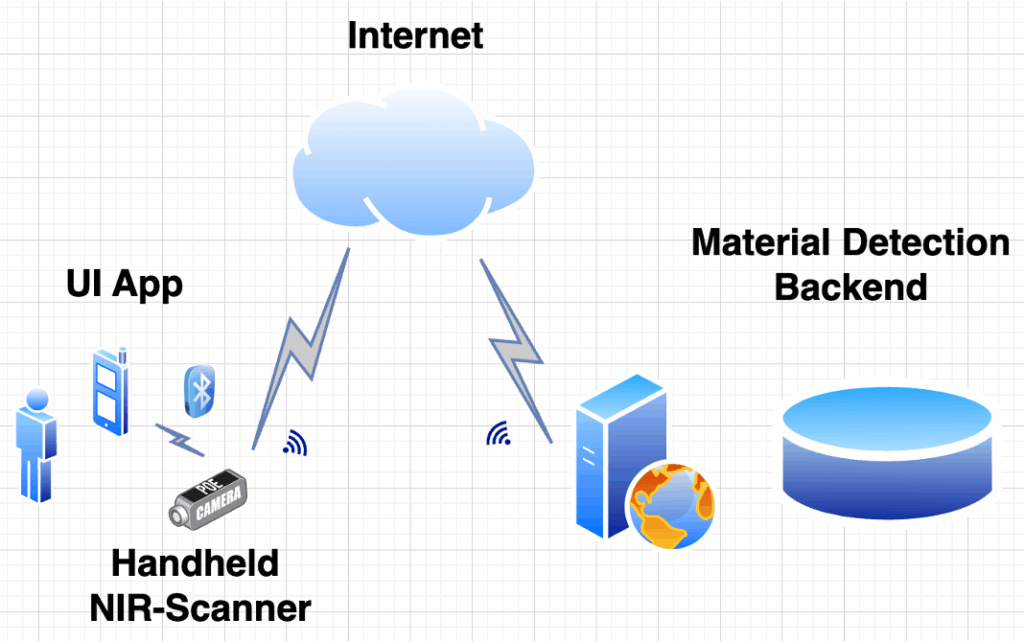
Kuva 3. Järjestelmäarkkitehtuuri (Kuva: Matti Welin)
Sulautettu tietokone
Järjestelmävaatimusten perusteella laitteen tietokoneeksi valittiin Raspberry Pi Zero W1.1, joka soveltuu fyysisiltä mitoiltaan (65x30mm) ja liitettävyydeltään kannettavaan laiterakenteeseen. Se koostuu keskusyksiköstä ja -muistista, langattomasta verkkoyhteydestä, Bluetooth-liitynnästä, USB-portista sekä mikroUSB-liitynnästä akkukäyttöä varten. Lisäksi laitteessa on 26 kpl yleiskäyttöisiä IO-liityntöjä, joilla kytkimet ja ledit liitetään laitteeseen. (Raspberry Pi 2025.)
Akkupaketiksi valittiin PiSugar’in S 1200 mAh valmis tuote. Virrankulutuslaskelmien perusteella (Raspberry Pi 120-180mA ja Nirone 60mA) tällä akkupaketilla saavutetaan noin tunnin käyttöikä. Se kytketään fyysisesti pogo-liittimillä piirikorttiin ja sen lataaminen tapahtuu mikroUSB-portin kautta. (PiSugar 2025.)
Pilvipalvelut ja graafinen käyttöliittymä
Koska Raspberry Pi -tietokone ei kykene raskaisiin laskentatehtäviin, materiaalintunnistukseen liittyvät algoritmit suoritetaan pilvipalvelussa. NIR-spektrien siirto pilvipalveluun tehdään WLAN-yhteyden kautta, jota pitkin tunnistustulos palautuu päätelaitteeseen. Pilvi-integraatiota varten käytetään REST API- tai MQMM-rajapintoja. WLAN-siirrossa autentikoinnista ja tietoturvasta on huolehdittu. Yhteys pilvipalveluun mahdollistaa skaalautuvien analyysipalveluiden ja koneoppimismallien hyödyntämisen.
Graafinen käyttöliittymä toimii vuorovaikutuksessa käyttäjän kanssa ja kommunikoi Bluetooth yhteyden avulla sulautetun tietokoneen kanssa. Käyttöliittymä toteutettiin mobiilisovelluksena Android-älypuhelimessa.
Kotelointi ja prototyyppi
Jotta suunniteltu laitteisto toimisi käsiskannerina, tulee se pakata yhdeksi kokonaisuudeksi. Mekaaniseksi rakenteeksi suunniteltiin 3D-tulostettava kotelo, joka yhdistää Nirone-sensorin, Raspberry Pi:n, akkupaketin sekä kytkimet ja RGB-ledin. Kotelo muistuttaa käsikäyttöistä kuumemittaria, jossa ns. pistoolin päässä sijaitsee itse sensori. Liipaisin toimii mittaustapahtuman aloituskytkimenä. Kotelon takaosassa on kytkimet dark- ja valkoreferenssin kalibrointia varten. Näiden väliin asennettiin RGB-ledi tilatietoa varten. Akkupaketti asennettiin ns. back-to-back -tyyppisesti piirikorttiin. Akun latausliitin sijoitettiin liipaisinosan pohjaan. Prototyyppivaiheen suunnittelussa painopiste oli komponenttien sijoittelussa ja mekaanisessa yhteensopivuudessa, ei vielä ergonomiassa tai tuotantovalmiudessa. Käsiskannerin prototyyppi on esitetty kuvassa 4.
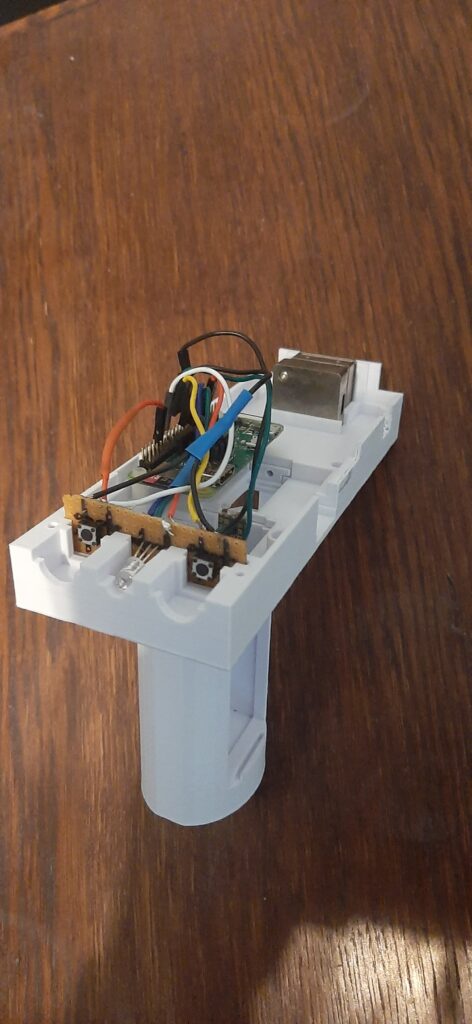
Kuva 4. Käsiskannerin prototyyppi (Kuva: Jesse Piirainen)
Prototyypin avulla testattiin, että suunniteltu ratkaisu oli käytännössä toimiva. Sulautettuun tietokoneeseen kehitettiin Python-ohjelma, joka lukee Nirone-sensoria käyttäjän komentojen ohjaamana. Mittaustuloksen valmistuttua spektri lähettiin analysoitavaksi pilvipalveluun, joka palautti tunnistustiedot todennäköisyyksineen. Mittaustapahtuman lopuksi Androidille kehitetty sovellus näytti tulokset graafisessa käyttöliittymässä. Python- ja Android-ohjelmat keskustelevat keskenään Bluetoothin avulla. Kuvassa 5 on esitetty Android-sovelluksen käyttöliittymä.
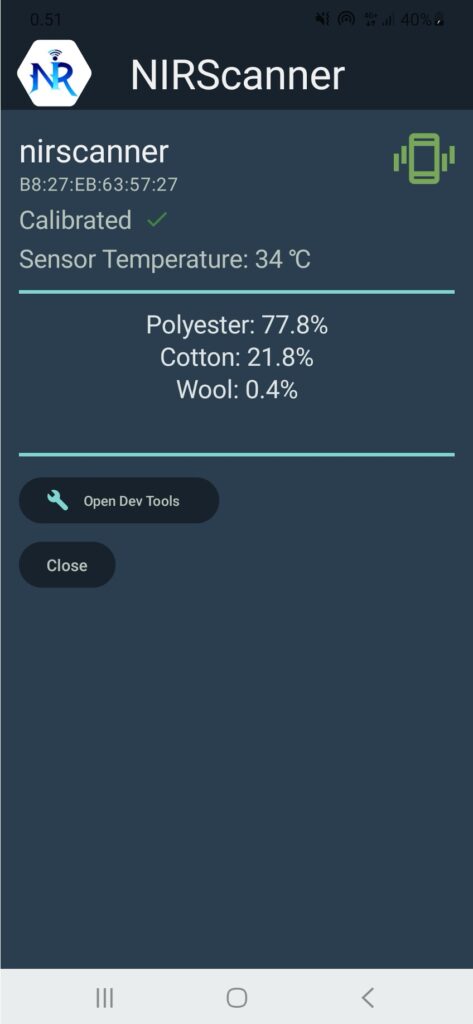
Kuva 5. Käsiskannerin käyttöliittymän prototyyppi (Kuva: Jesse Piirainen)
Tämän lisäksi prototyyppiin kehitettiin tuki offline-toiminnalle. Jos verkkoyhteyttä ei ole, spektri analysoitiin paikallisesti erityisen lite-mallin avulla. Lite-malli on kevennetty versio mallista resurssirajattuihin ympäristöihin.
Yhteenveto
Kehitetty käsiskanneri perustuu kaupalliseen NIR-sensoriin ja edulliseen sulautettuun alustaan, joiden ympärille rakennettiin kokonaisjärjestelmä materiaalin spektroskooppista tunnistamista varten. Arkkitehtuuri jakaa toiminnallisuuden kolmeen pääosaan: mittausanturi ja ohjaus sulautetussa laitteessa, käyttöliittymä mobiilisovelluksessa ja materiaalintunnistus pilvipalvelussa. Modulaarinen toteutus mahdollistaa järjestelmien osien jatkokehityksen sekä ohjelmisto- että laitteistotasolla toisistaan riippumatta. Tämä mahdollistaa omien näytteiden spektrien lisäämisen materiaalikirjastoon, sekä niiden käsittelyn tunnistuksen optimoimiseksi.
Lähteet
Cura, K., Rintala, N., Kamppuri, T., Saarimäki, E. & Heikkilä, P. 2021. Textile Recognition and Sorting for Recycling at an Automated Line Using Near Infrared Spectroscopy. Recycling. Vol. 6 (1), 11. Viitattu 11.6.2025. Saatavissa https://doi.org/10.3390/recycling6010011
European Commission. 2023. Proposal for a DIRECTIVE OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL amending Directive 2008/98/EC on waste. COM(2023) 420 final. 2023/2024. Viitattu 11.6.2025. Saatavissa https://environment.ec.europa.eu/system/files/2023-07/Proposal%20for%20a%20DIRECTIVE%20OF%20THE%20EUROPEAN%20PARLIAMENT%20AND%20OF%20THE%20COUNCIL%20amending%20Directive%20200898EC%20on%20waste%20COM_2023_420.pdf
FINIX. 2025. Sustainable textile systems: Co-creating resource-wise business for Finland in global textile networks. Viitattu 27.6.2025. Saatavissa https://finix.aalto.fi/
Köhler, A., Watson, D., Trzepacz, S., Löw, C., Liu, R., Danneck, J., Konstantas, A., Donatello, S. and Faraca, G. 2021. Circular Economy Perspectives in the EU Textile sector. Luxembourg: Publications Office of the European Union. EUR 30734 EN. Viitattu 11.6.2025. Saatavissa https://dx.doi.org/10.2760/858144
Matoha Instrumentation Ltd. 2022. FabriTell. Viitattu 25.6.2025. Saatavissa https://matoha.com/fabrics-identification
PiSugar. 2025. PiSugar S 1200 mAh Raspberry Pi Zero Battery. Viitattu 5.6.2025. Saatavissa https://www.pisugar.com/products/pisugar-s-raspberry-pi-zero-battery
Phys.org. 2025. Sweden drowns in discarded fast fashion items. Viitattu 11.6.2025. Saatavissa https://phys.org/news/2025-04-sweden-discarded-fast-fashion-items.html
Raspberry Pi. 2025. Raspberry Pi hardware. Viitattu 5.6.2025. Saatavissa https://www.raspberrypi.com/documentation/computers/raspberry-pi.html
Spectral Engines. 2017. Spectral Engines Nirone Sensor. YouTube.Viitattu 5.6.2025. Saatavissa https://www.youtube.com/watch?v=97vyfc9iuzo
Spectral Engines. 2024. Nirone Sensor S Evaluation kit. Viitattu 5.6.2025. Saatavissa https://spectralengines.com/wp-content/uploads/2024/02/SE_NIRONE_Sensor_EVK_022024_web.pdf
Kirjoittajat
Matti Welin toimii LAB-ammattikorkeakoulussa teknologiayksikössä yliopettajana tieto- ja viestintätekniikan koulutusvastuussa. Hän toimi FINIX-projektissa IT-, ML- ja AI-asiantuntijana.
Kirsti Cura työskentelee LAB-ammattikorkeakoulussa teknologiayksikössä johtavana asiantuntijana Kestävät materiaaliratkaisut -tutkimusryhmässä, ja on työskennellyt FINIX-projektissa erilaisissa tehtävissä.
Jesse Piiparinen opiskelee LAB-ammattikorkeakoulussa tieto- ja viestintätekniikan koulutusvastuussa ja suoritti harjoittelunsa FINIX-projektissa käsiskannerin kehitystehtävissä.
Artikkelikuva: https://pixabay.com/fi/illustrations/ai-luotu-j%C3%A4tett%C3%A4-roska-muovi-9272482/ (Pixabay licence)
Viittausohje
Welin, M., Cura, K. & Piiparinen, J. 2025. NIR-pohjaisen käsiskannerin suunnittelu ja pilotointi. LAB Pro. Viitattu pvm. Saatavissa https://www.labopen.fi/lab-pro/nir-pohjaisen-kasiskannerin-suunnittelu-ja-pilotointi/






